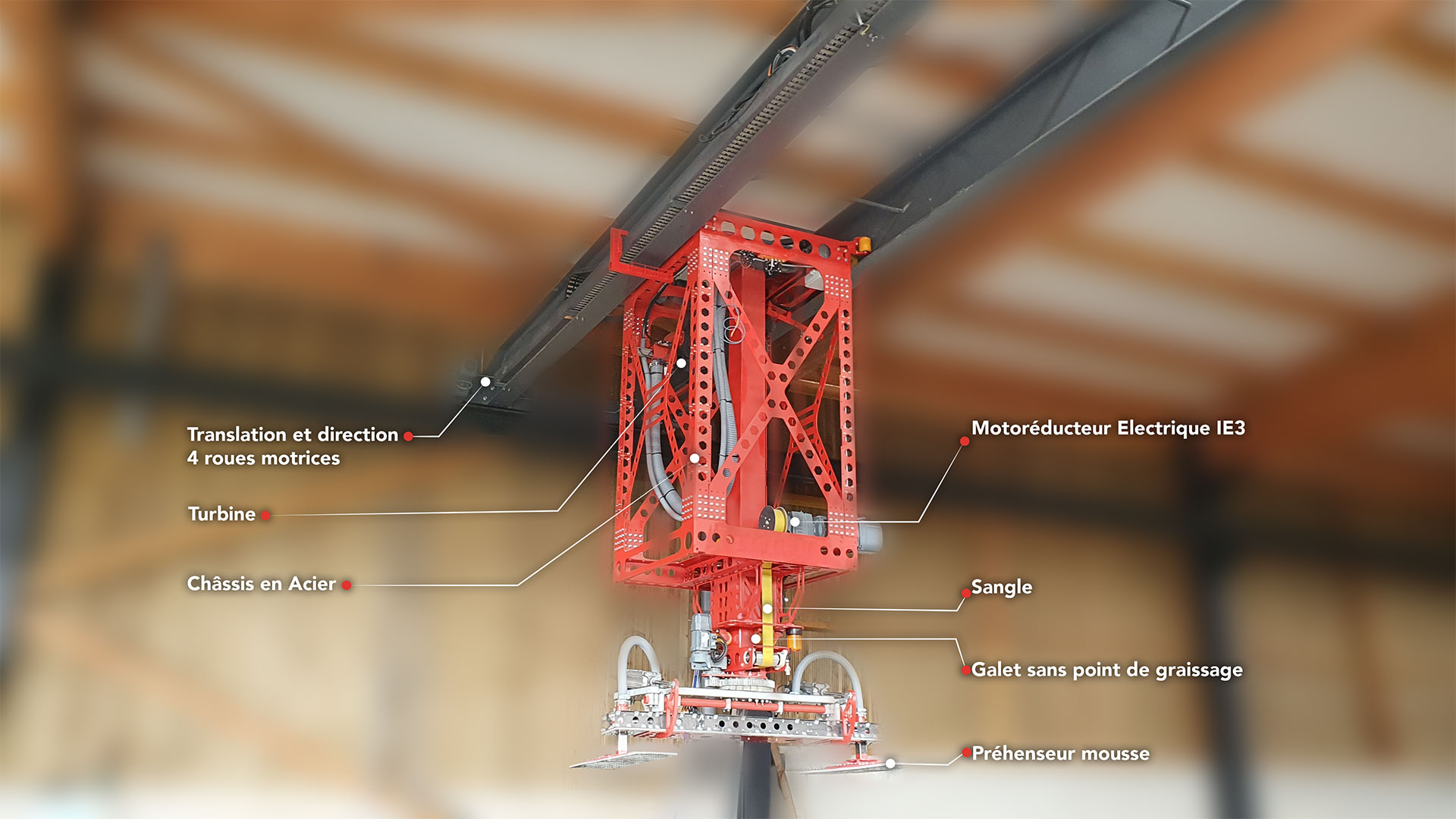
The motors are to IE3 technology standard
Reducing electrical consumption.
Multi-cell gripper for handling rough, porous, deformed products
Monitoring system makes it possible to anticipate the replacement date for the foams
Reducing maintenance costs with optimum suction power
Replaceable foams with two-component adhesive allowing rapid maintenance / replacement.
Lifting by strap, simple and quick, easy maintenance
Smooth movements.
Turbine regulated and controlled by a PID.
Reduced electrical consumption
Noise reduction.
Mousse Process pays particular attention to optimum structure design to reduce moving masses.
The Design Office analyse the structures using RDM software to guarantee sufficient rigidity without penalising electricity consumption.



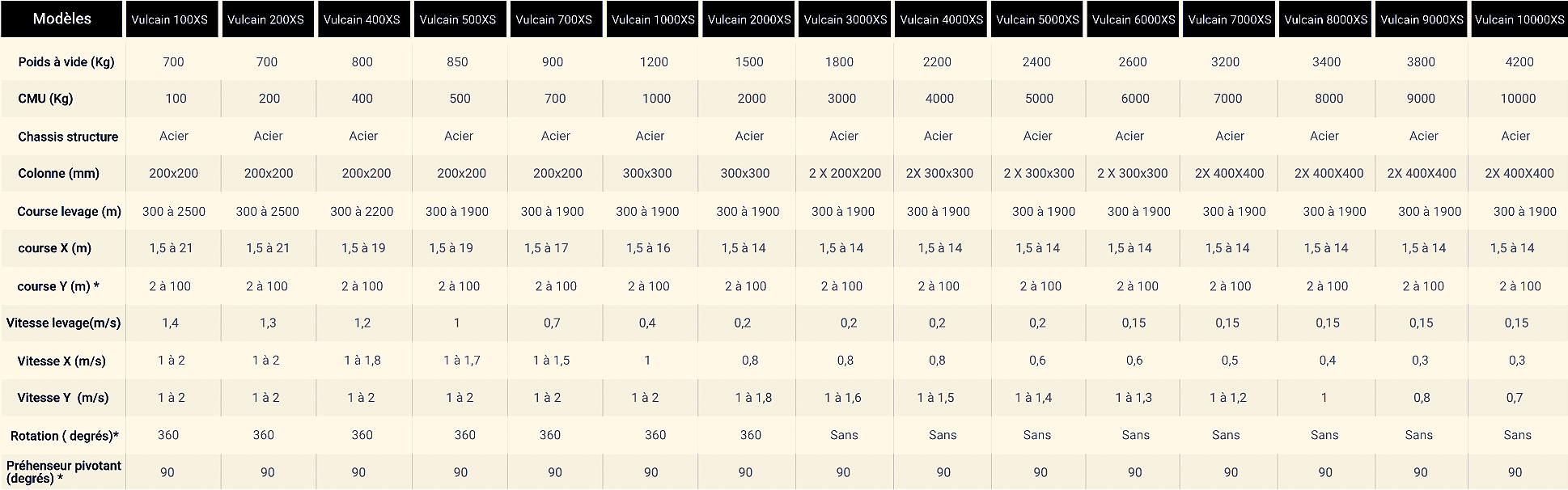

Vulcain600XS

Vulcain200XS

Vulcain300XS
